СТЕРЕОФОТОГРАММЕТРИЧЕСКАЯ ОБРАБОТКА МАТЕРИАЛОВ АЭРОФОТОСЪЕМОК
1. Аэрофотоснимки и их масштабы
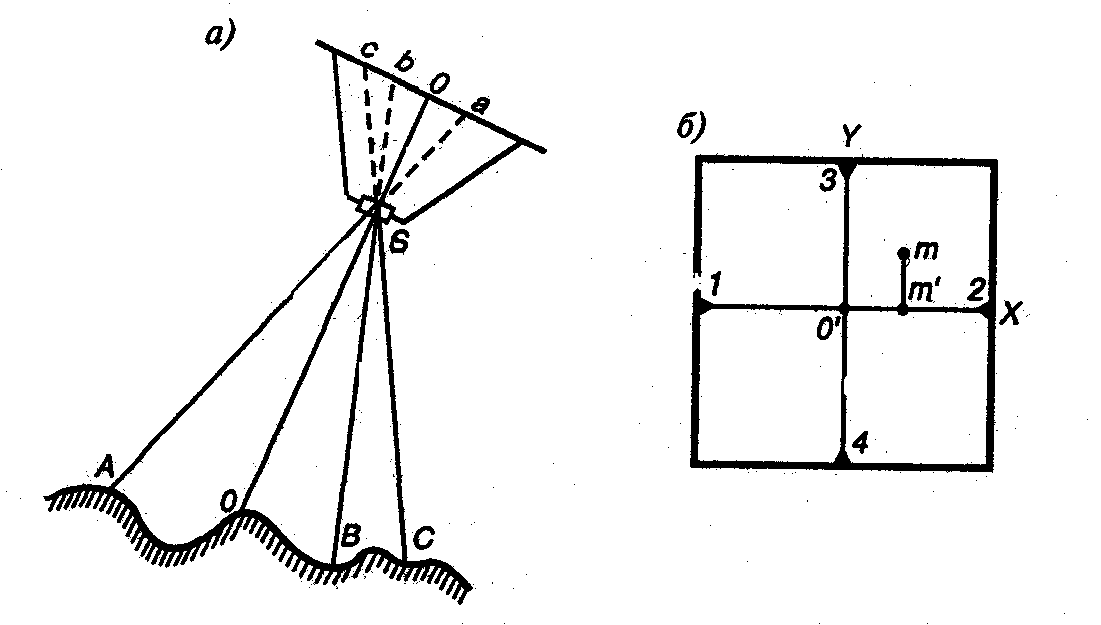
Рис. 1. Схема определения положения точек на аэрофотоснимке:
а - центральная проекция снимка; б - оси координат снимка
x?= o?m?; y?= m?m (1)
, (2)
(3)
(4)
2. Элементы ориентирования аэрофотоснимков
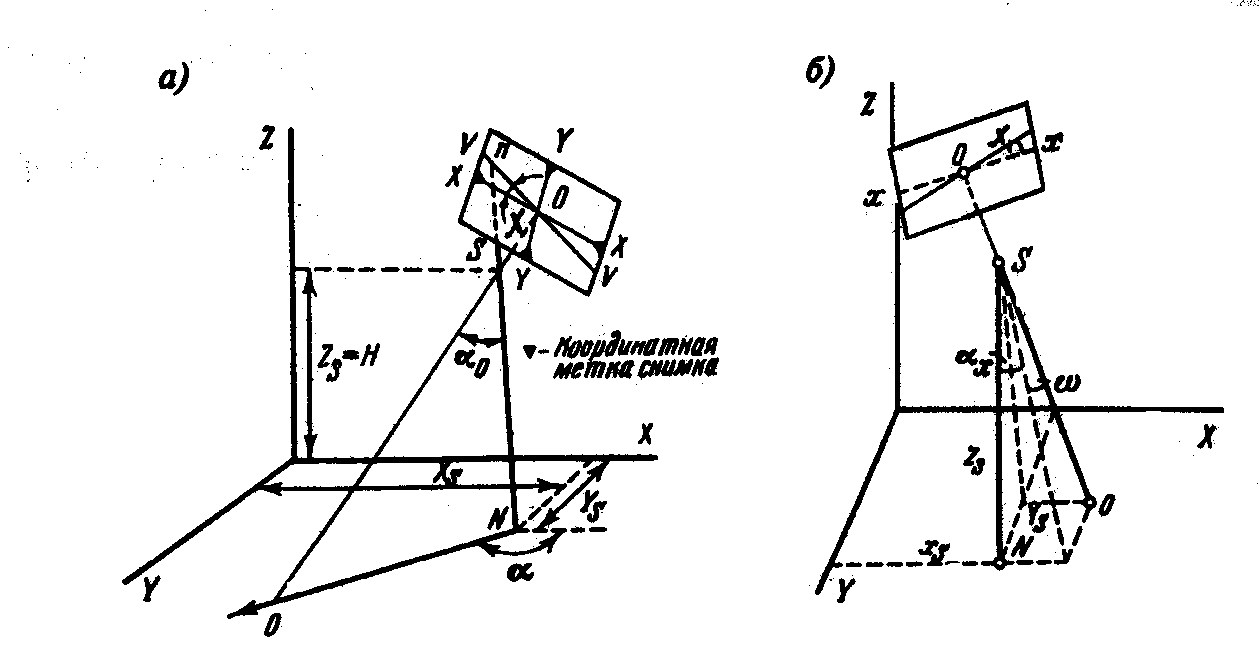
Рис. 4. Системы внешнего ориентирования аэрофотоснимков:
а - первая; б - вторая
ХS1, YS1, ZS1, ?X1, ?1, ?1
ХS2, YS2, ZS2, ?X2, ?2, ?2
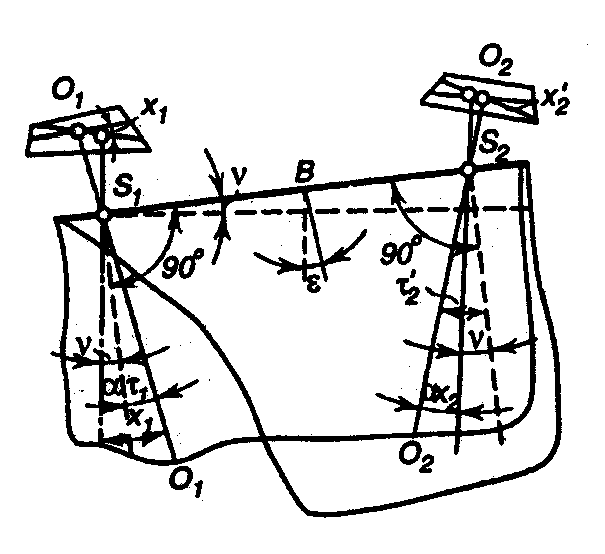
Рис. 5. Элементы взаимного ориентирования аэрофотоснимков. Вид аэросъемочного маршрута сбоку
ХS1, YS1, ZS1, ?X1, ?1, ?1, В, ?, v, ??X, ??, ??;
ХS1, YS1, ZS1, ?X1, ?1, ?1, В, ?1, ?2, ?1, ?2, ?
3. Фотосхемы
4. Фототриангуляция
, мм. Такие контурные точки называют центральными. И только при построении фототриангуляции в горных районах в качестве вершины углов обязательно принимают точку надира.
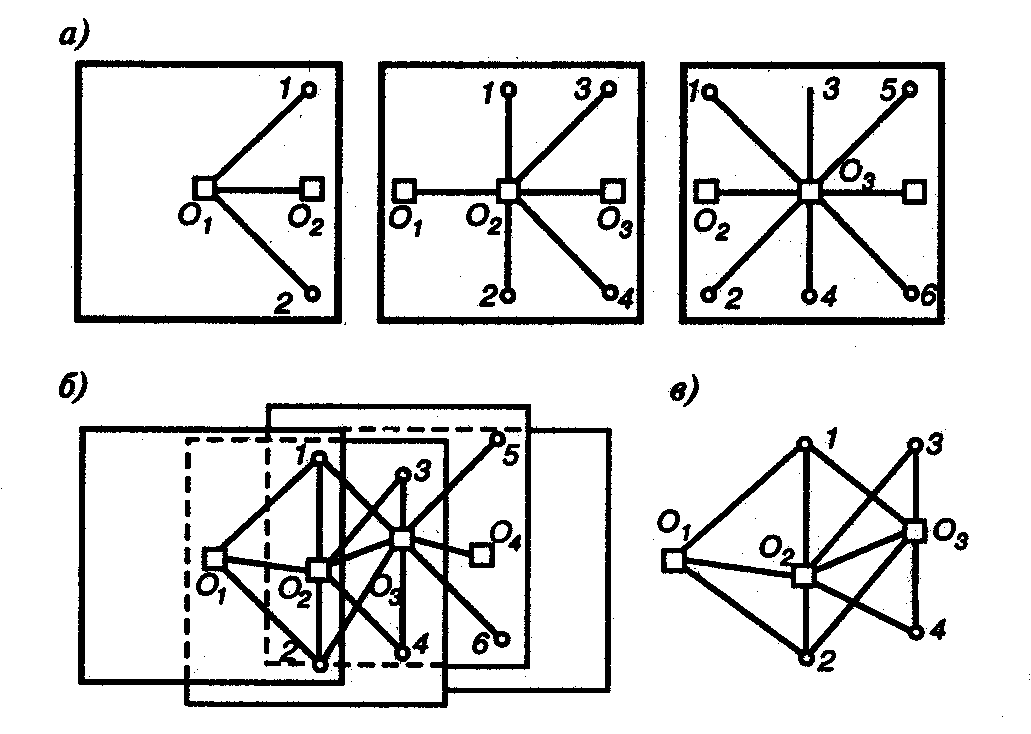
Рис. 6. Маршрутная фототриангуляция:
а - центральная точка снимка с поперечными направлениями; б - базис; в - построение на плане базиса и плановых опорных точек
5. Трансформирование аэрофотоснимков. Фотопланы
6. Дешифрирование аэрофотоснимков
Таблица 1
|
N п/п |
Объекты топографического дешифрирования |
Главные дешифровочные признаки |
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|
6 |
|
|
|
7 |
|
|
|
8 |
|
|
|
9 |
|
|
|
10 |
|
|
|
11 |
|
|
|
12 |
|
|
|
13 |
|
|
|
14 |
|
|
|
15 |
|
|
|
16 |
|
|
|
17 |
|
|
|
18 |
|
|
7. Стереофотограмметрическая обработка аэрофотоснимков
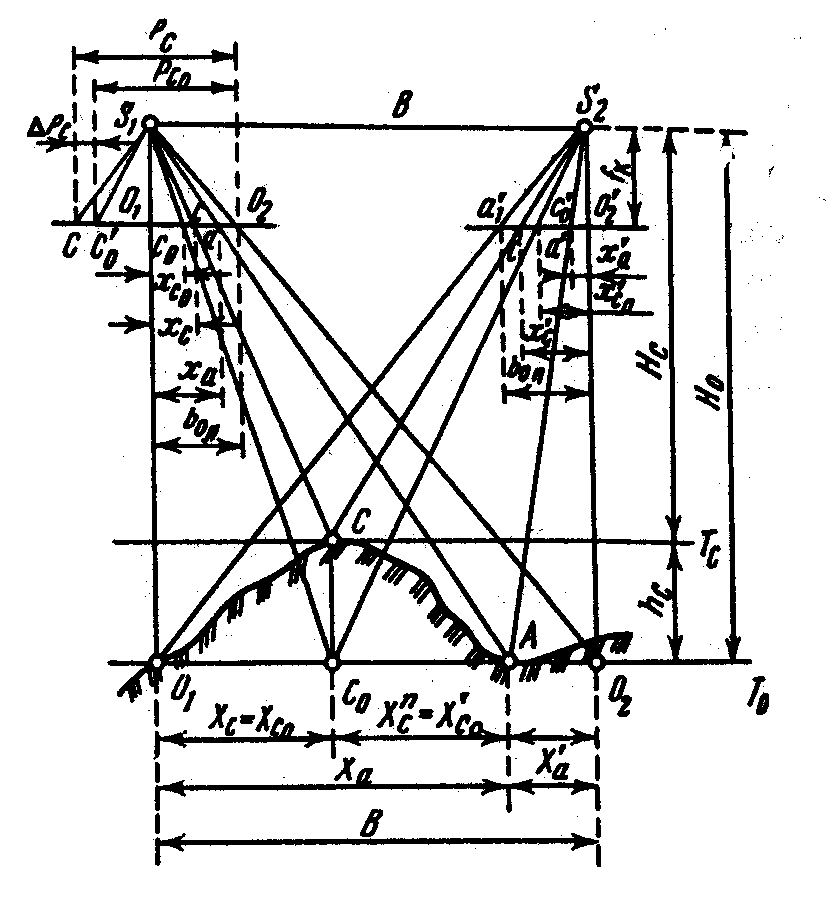
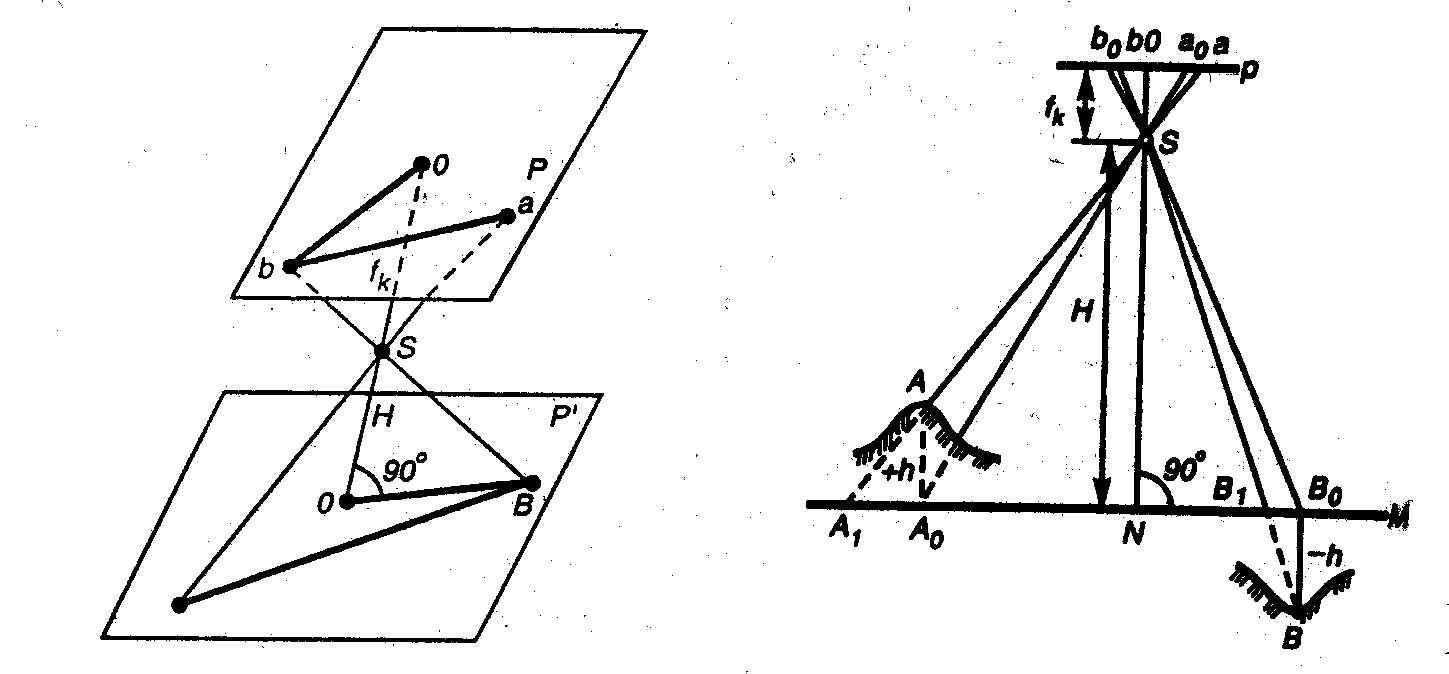
Рис. 9. Схема определения превышений на стереопаре горизонтального случая аэросъемки
, (5)
ра = рс 0 (6)
, (7)
, то величина превышения hac между точками А и С определится
, (8)
?pас = ?р'ас + ?pас. (9)
8. Автоматизированная система цифровой фотограмметрии "РНОТОМОD"